- Petter Reinholdtsen + Petter Reinholdtsen
@@ -51,7 +51,7 @@ compiler needed to build the source for the NXT is already included in Debian, so I was read to go in less than an hour. The resulting robot do not look very impressive in its simplicity: -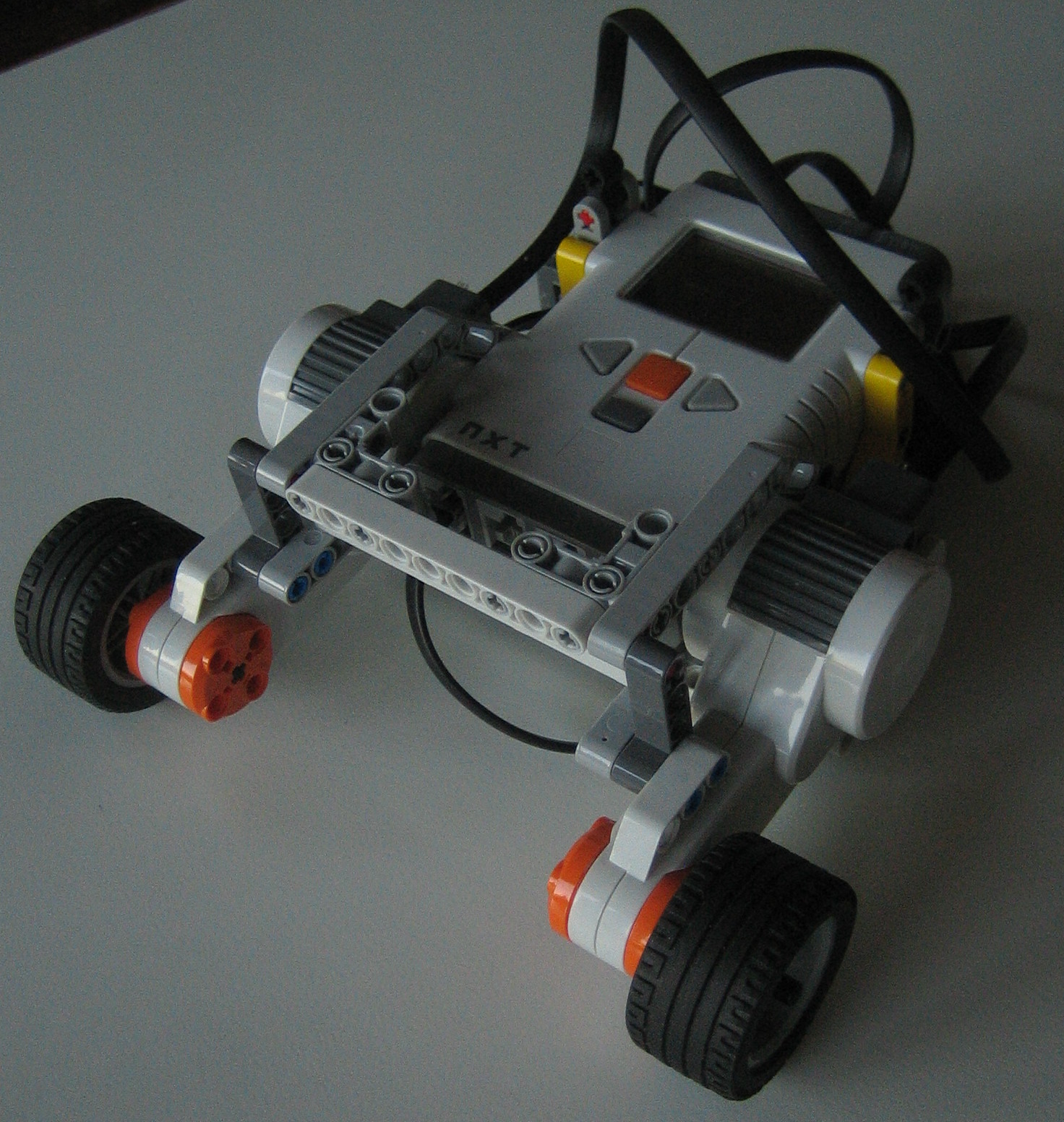
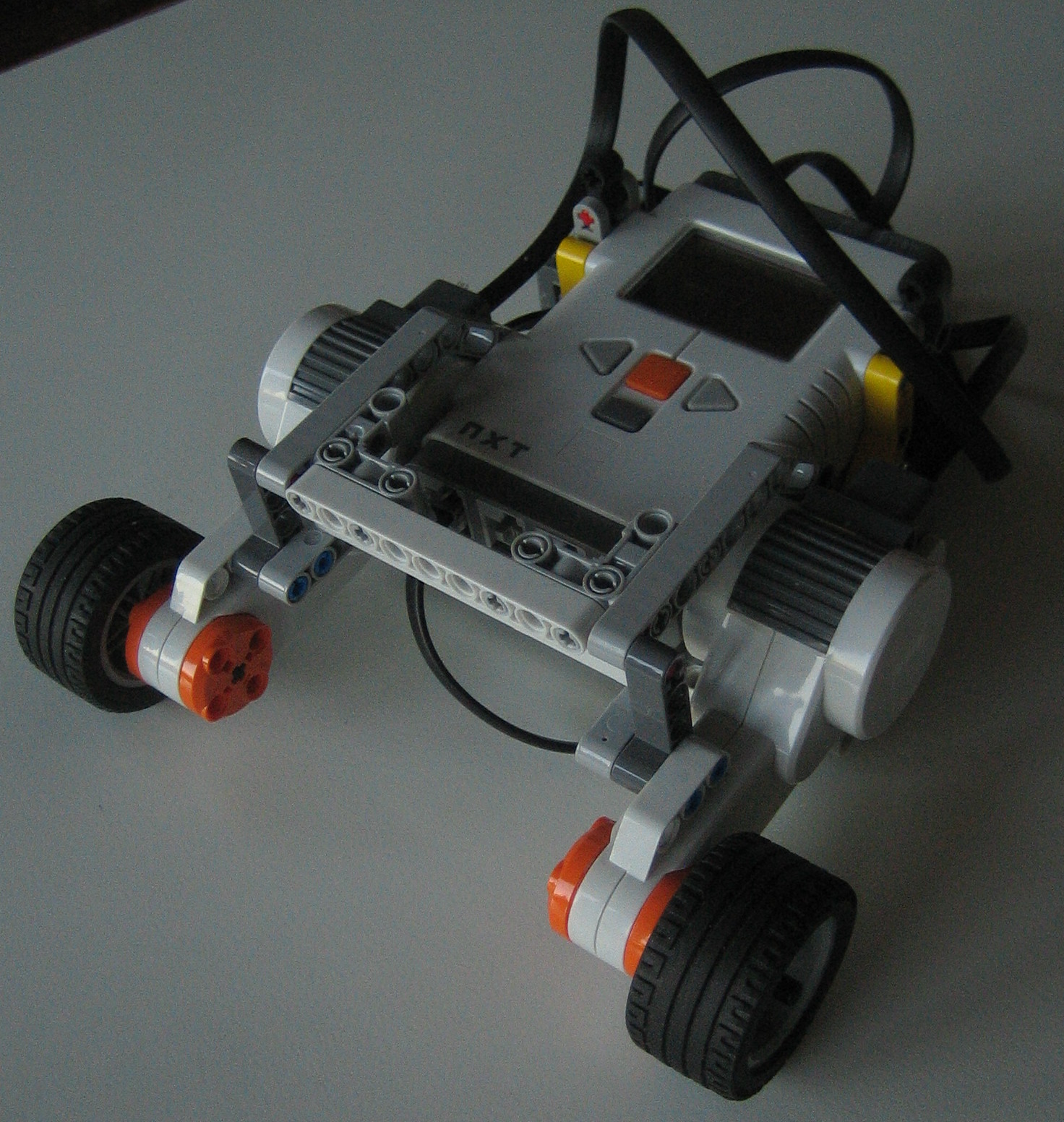
Because I lack the infrared sensor used to control the robot in the design from HiTechnic, I had to comment out the last task @@ -60,7 +60,7 @@ working without that sensor present. Now it balances just fine until the battery status run low:
Now we would like to teach it how to follow a line and take remote @@ -76,7 +76,7 @@ Debian tools needed to program the systems I own work as they should.