PSD calibration package for eyebot robots
Current README
Calibrating the Eyebot IR distance sensors
==========================================
Version 0.1 by Petter Reinholdtsen <pere@td.org.uit.no>
To calibrate the IR distance sensors (PSDs) on the Eyebot, one need to
update the HDT with a more correct lookup table to map raw data into
distance in millimeter.
To get the correct lookup table, you run 'psd-calibrate.hex' on the
robot to collect the correct data. It assumes the VW drive functions
are working correct.
Collecting is done by placing the robot directly in front of the wall,
with at least 1.5 meters free space behind, and probably at least 0.5
meters of free space to either side. The front of the robot should
touch the wall. Distance is calculated from the sensors. It is
assumed that the sensors are 4.5 cm from the center of the robot
(between the wheels), and it is assumed that the wall is 6 cm from
this center.
The robot will then measure the raw values for the different sensor
pointing into the wall, while moving backwards until it reaches 1
meter. The measured data is the average of 10 values collected. When
it is finished it will stop and wait for the data to be collected.
The data can be collected using the serial port. Connect the robot to
the computer using the serial cable. The robot is using 115200 bps.
Run 'cat < /dev/ttyS0 | tee calibrate-data.raw' and press 'DUMP' on
the Robot. Check on the PC to make sure the information arrived, and
press Ctrl-C to stop receiving.
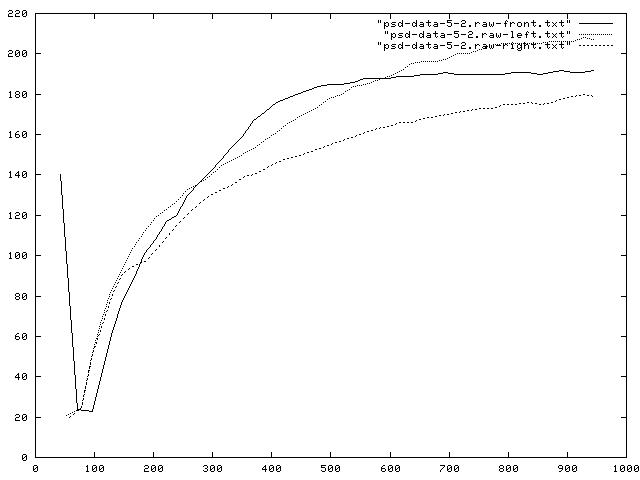
When the datafile is saved on the PC, you can look at it using
'./plot-psd-calibr.sh calibrate-data.raw'. This will show the mapping
between cm (x) and raw data measured (y).
To make the HDT entry, run './make_hdt_map.pl calibrate-data.raw' to
get the PSD lookup table in C format. These tables need to be
inserted into the HCD C file, and the robot updated with the new .hex
file. Remember to change 'distX' to the correct symbol for the given
PSD.
Newer versions might be available from
<URL:http://ciips.ee.uwa.edu.au/~pere/RoBIOS/>.
{kind=link}