A while back a college and friend from Debian and the Skolelinux /
Debian Edu project approached me, asking if I knew someone that might
be interested in helping out with a technology project he was running
as a teacher at L'école
franco-danoise - the Danish-French school and kindergarden. The
kids were building robots, rovers. The story behind it is to build a
rover for use
on
the dark side of the moon, and remote control it. As travel cost
was a bit high for the final destination, and they wanted to test the
concept first, he was looking for volunteers to host a rover for the
kids to control in a foreign country. I ended up volunteering as a
host, and last week the rover arrived. It took a while to arrive
after it was
built and shipped, because of customs confusion. Luckily we were
able fix it quickly with help from my colleges at work.
This is what it looked like when the rover arrived. Note the cute
eyes looking up on me from the wrapping


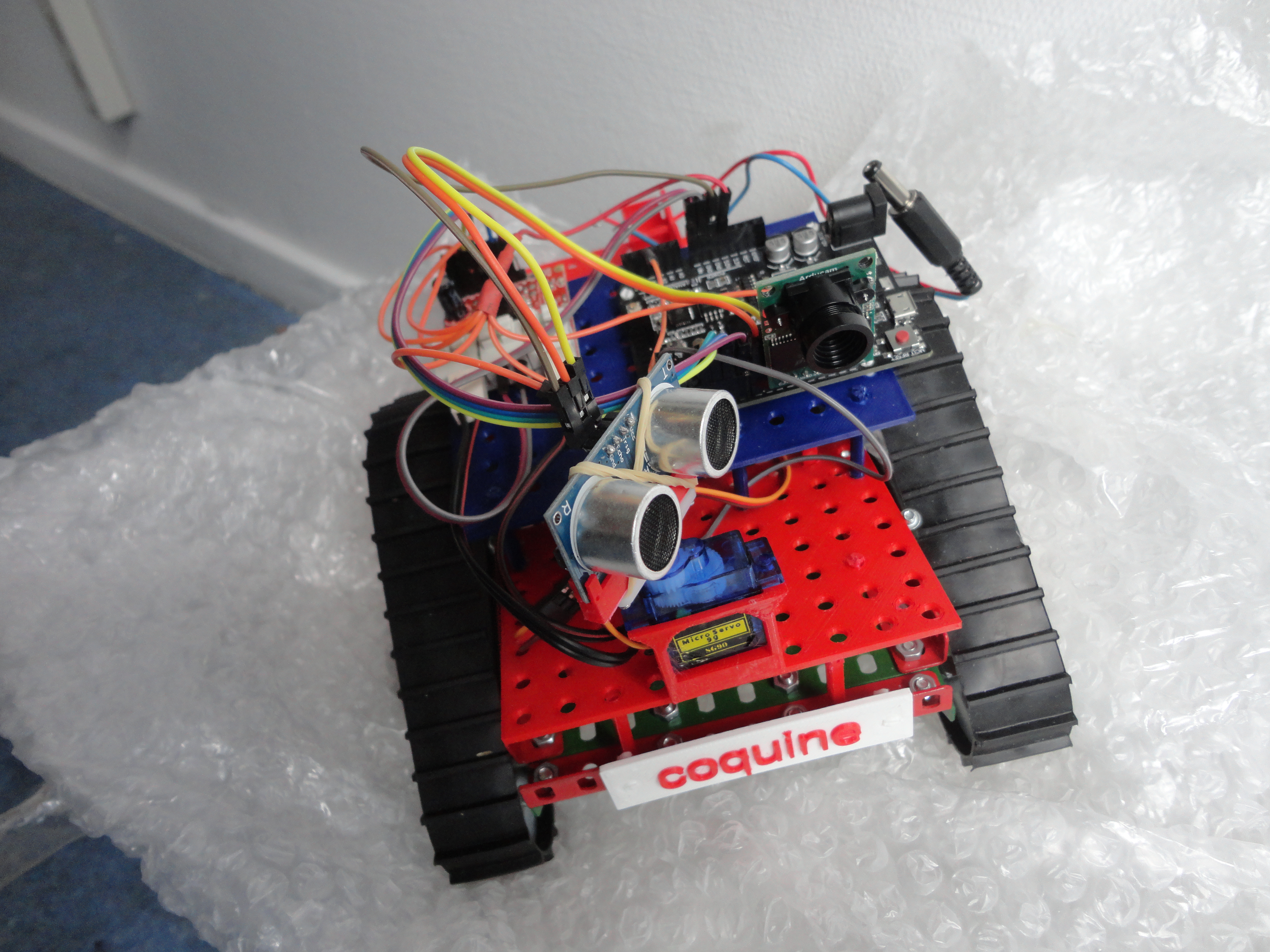
Once the robot arrived, we needed to track
down batteries and figure out how to build custom firmware for it with
the appropriate wifi settings. I asked a friend if I could get two
18650 batteries from his pile of Tesla batteries (he had them from the
wrack of a crashed Tesla), so now the rover is running on Tesla
batteries.
Building
the rover
firmware proved a bit harder, as the code did not work out of the
box with the Arduino IDE package in Debian Buster. I suspect this is
due to a unsolved
license problem
with arduino blocking Debian from upgrading to the latest version.
In the end we gave up debugging why the IDE failed to find the
required libraries, and ended up using the Arduino Makefile from the
arduino-mk Debian
package instead. Unfortunately the camera library is missing from
the Arduino environment in Debian, so we disabled the camera support
for the first firmware build, to get something up and running. With
this reduced firmware, the robot could be controlled via the
controller server, driving around and measuring distance using its
internal acoustic sensor.
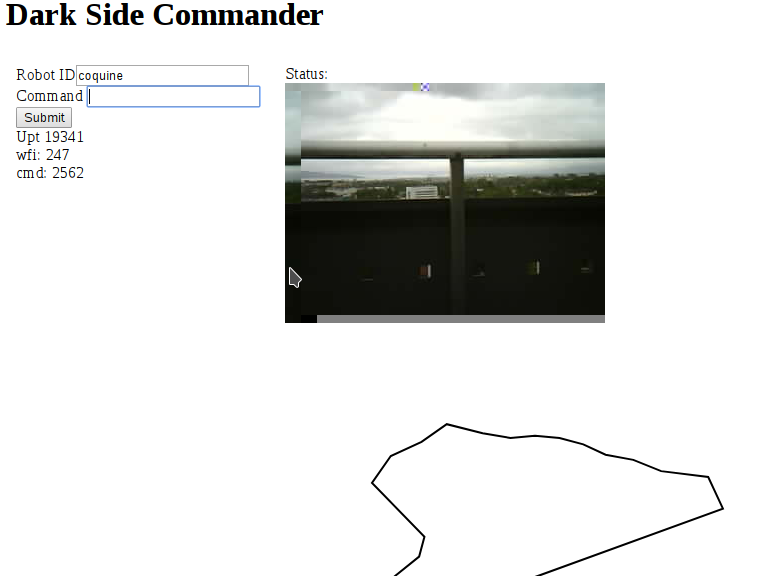
Next, With some help from my friend in Denmark, which checked in the
camera library into the gitlab repository for me to use, we were able
to build a new and more complete version of the firmware, and the
robot is now up and running. This is what the "commander" web page
look like after taking a measurement and a snapshot:
If you want to learn more about this project, you can check out the
The
Dark Side Challenge Hackaday web pages.
As usual, if you use Bitcoin and want to show your support of my
activities, please send Bitcoin donations to my address
15oWEoG9dUPovwmUL9KWAnYRtNJEkP1u1b.